Lab 1B
The purpose of this lab is to establish Bluetooth connection between the Artemis and our personal computers. Using Jupyter and Arduino IDE together, we will be able to send and receive data using BLE that we will be able to build on for future labs.
Prelab
The prelab consisted of installing all necessary software to establish an initial Bluetooth connection. Once Python was installed, the next step was to establish a virtual environment that we could run all of our scripts through. This helps to keep all the files in a single location as well as protect our personal computers if anything were to go wrong. Then, once the Jupyter lab was up and running, we could update the Artemis's MAC address and create a unique UUID. Finally, once updating the command types and config file, we were read to start the introductory tasks in the lab.
Task 1: ECHO
The first task was to create an ECHO command that would send a string from our computer to the Artemis board, and in response, the Artemis would send back a string to the computer. Below is the ECHO case that was written on the Artemis board.
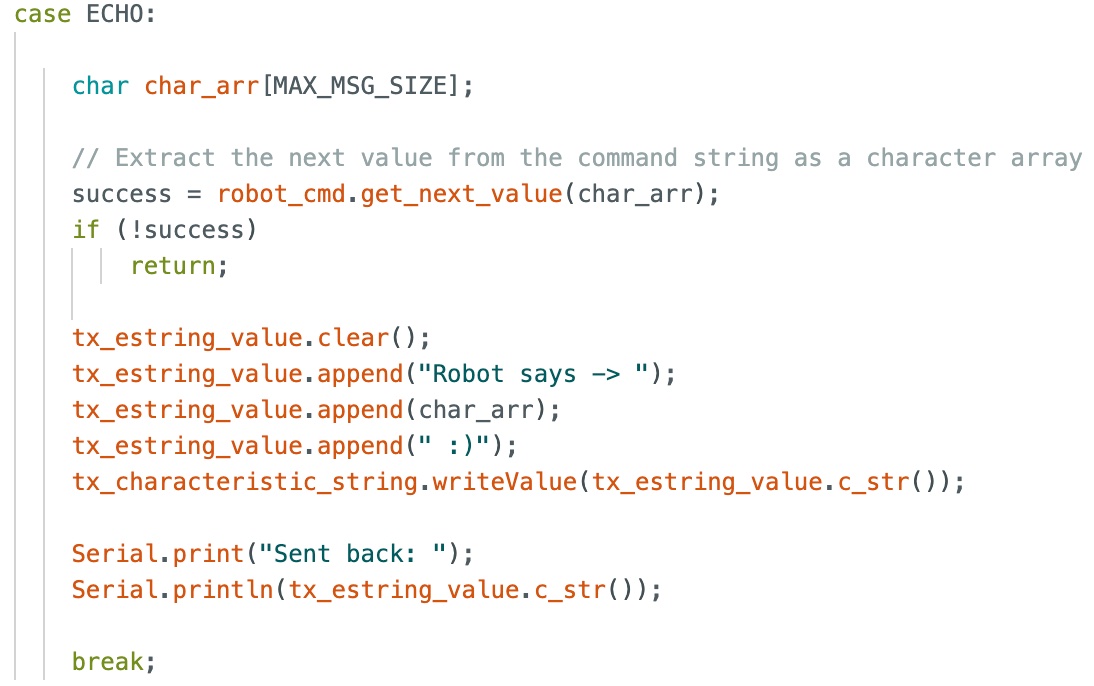
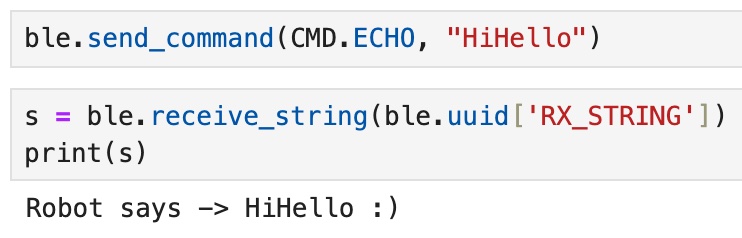
In order to send and receive the string, the following code was written in the Jupyter notebook. In this example, the sent message was "HiHello", and the reply from the robot was "Robot says --> HiHello :)".
Task 2: GET_TIME_MILLIS
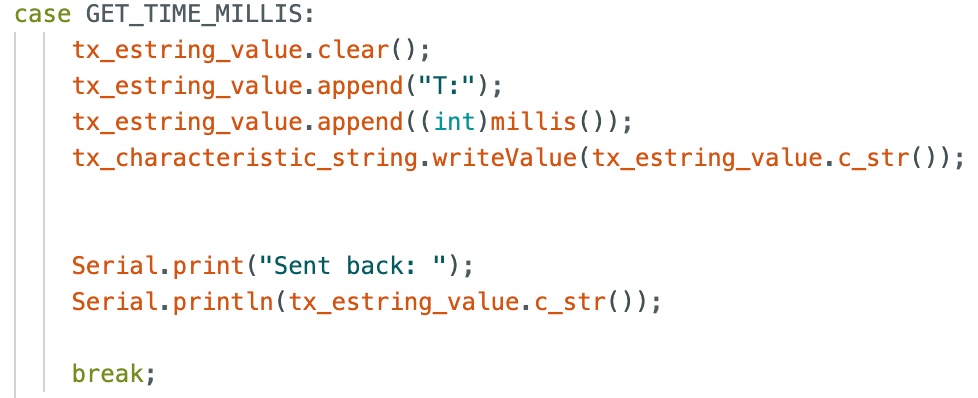
The second task was to create a command that would make the Artemis reply with a string that was the current time in milliseconds. This utilizes a built in function millis() that tracks the amount of time since the Artemis was powered on. Below is the GET_TIME_MILLIS case that was written on the Artemis board.
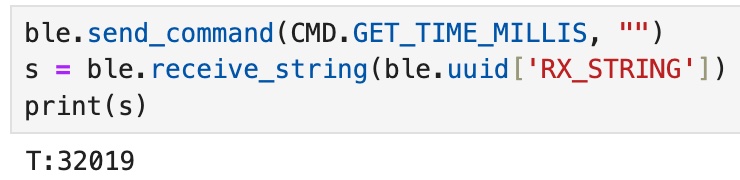
In order to send and receive the string, the following code was written in the Jupyter notebook.
Task 3: Notification Handler
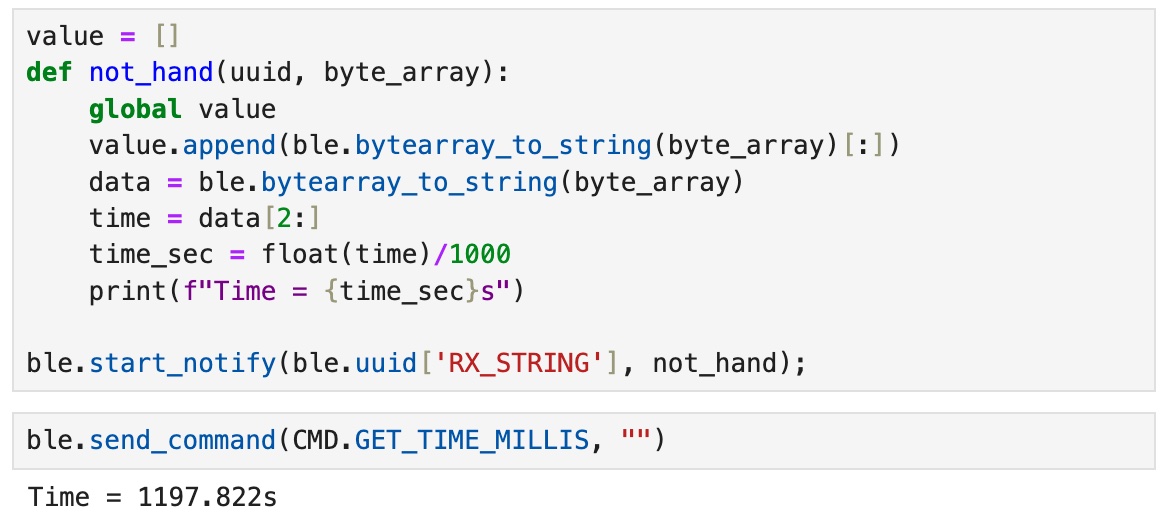
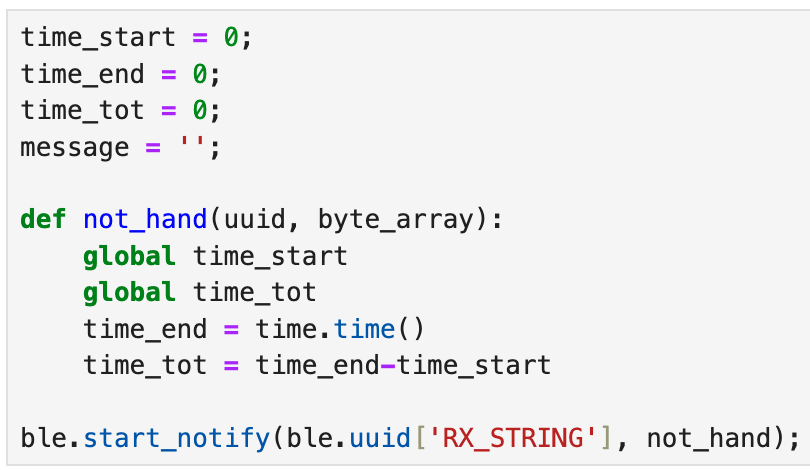
The next task was to write a notification handler that would help extract the time from the Artemis board. The purpose of a notification handler is to constantly be listening to the Artemis and send the desired information when the command is called. The image below shows the basic notification handler that I wrote to extract the time, in seconds, since the Artemis was powered on.
Task 4: GET_TIME_MILLIS_LOOP
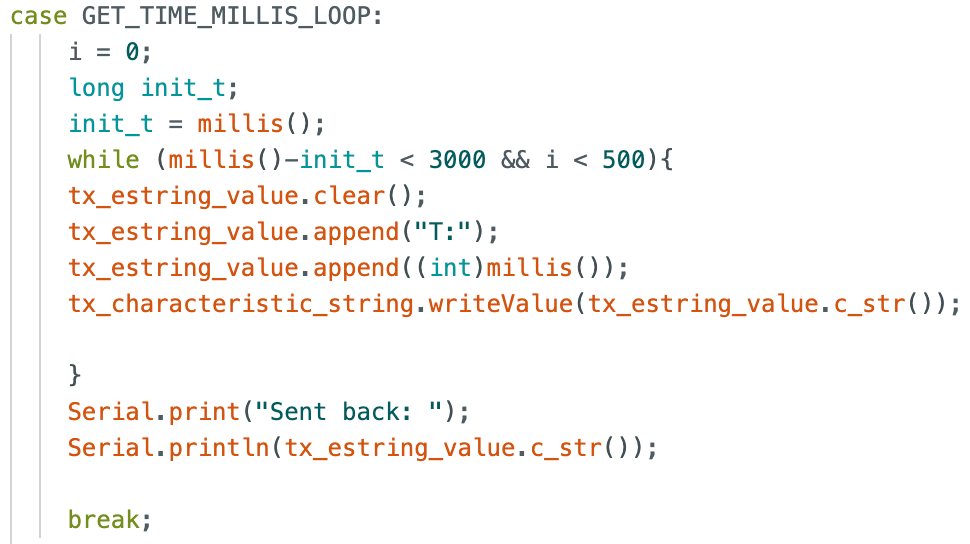
This next task builds off of the past two tasks by using a new notification handler to get the current time in milliseconds multiple times for a few seconds. By collecting the time stamps, we are able to see how quickly the Artemis can send messages to the computer. The code for the case written on Artemis is shown below.
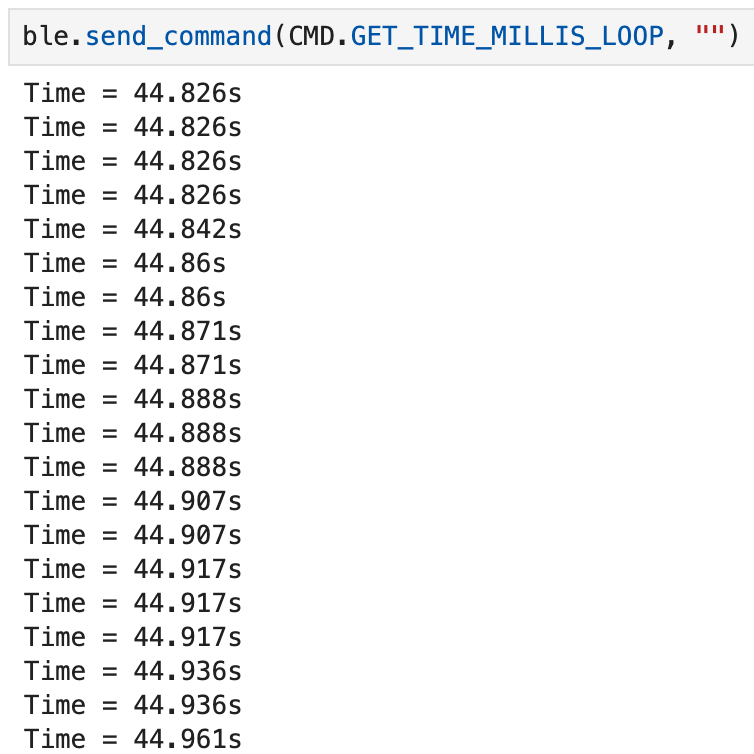
In order to receive the time stamps, the following code was written in the Jupyter notebook. A few of the timestamps are also shown below. Using these values, we can calculate that the Artemis can send about 148 messages per second. Since each message is about 14 bytes, we can say that the effective data transfer rate of this method is 2074 bytes per second.
Task 5: Time Stamp Array
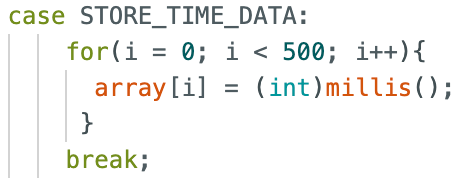
This task provides a new method for receiving data from the Artemis board. Instead of sending each message as it is called, the time stamps are stored in an array, and after a certain amount of time, the entire array is sent at once to the computer. I wrote two cases for this task: one to store the data in the array and another to send the array to the computer. The two cases are shown below.
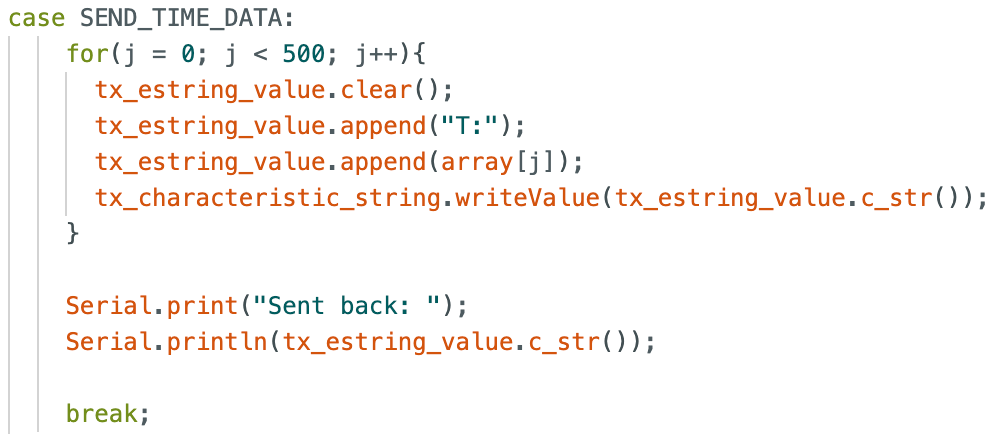
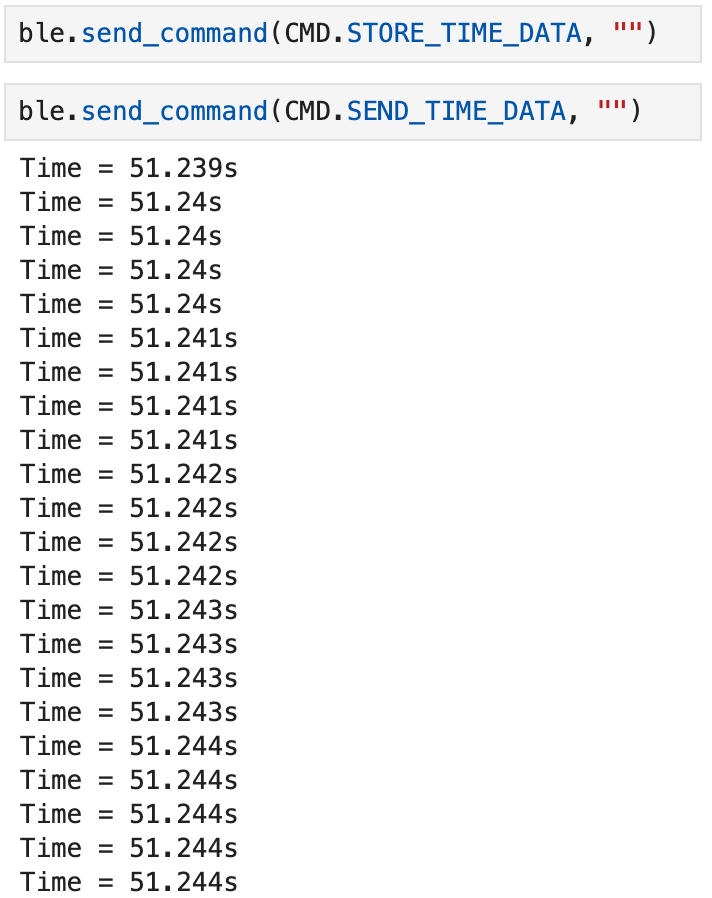
The commands to call these cases are shown below. As seen by the time stamps, the messages are able to be sent in closer succession since there is no lost time due to sending the message after each collection.
Task 6: Time Stamp Array
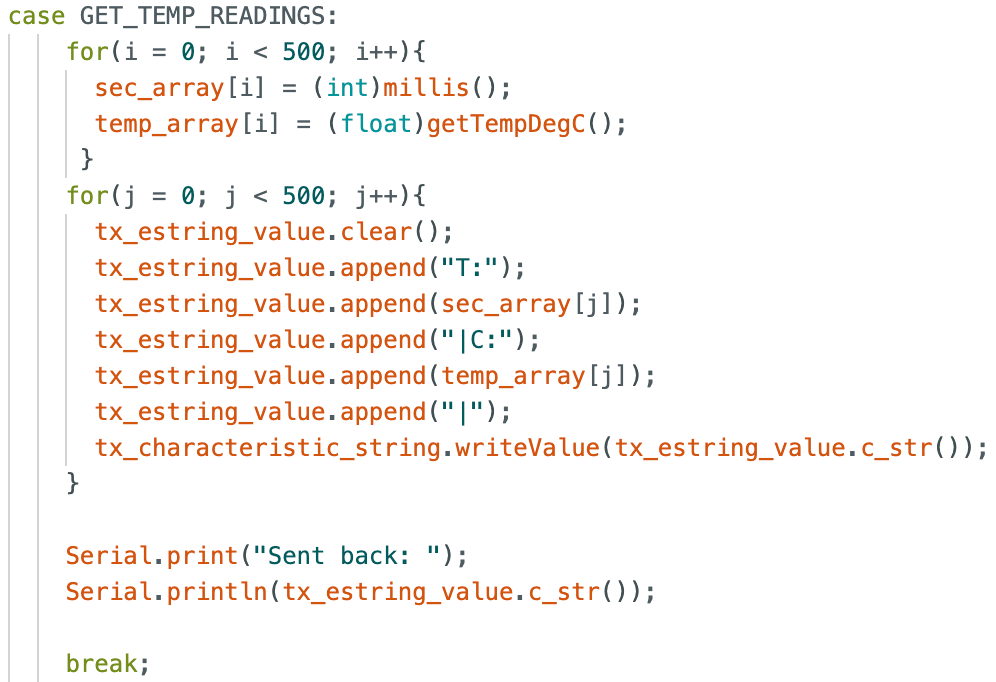
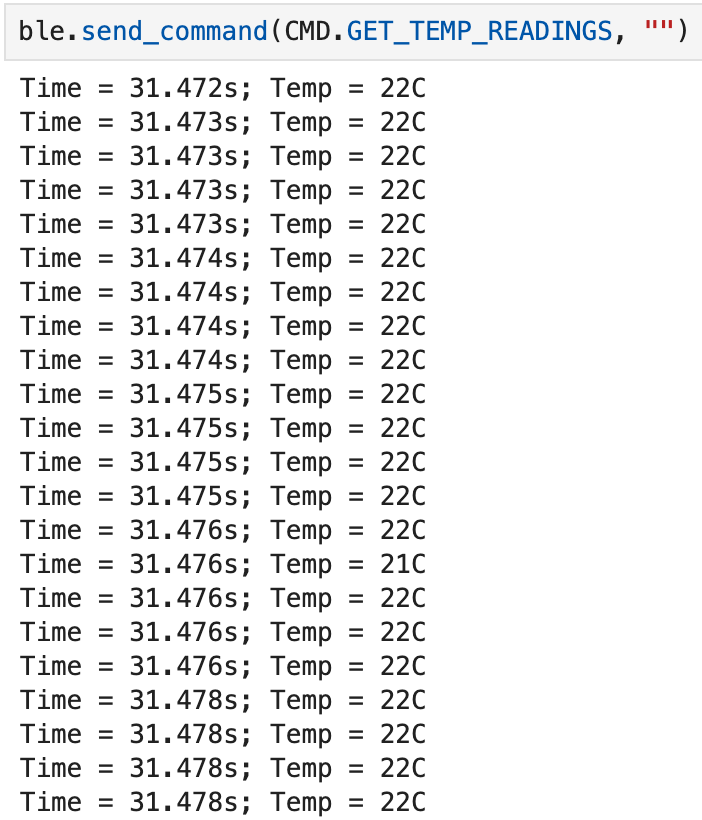
In this task, we are building off of the time array from the previous task by adding an additional array to collect the temperature reading as well. The output will then be a given temperature with a corresponding time stamp. The command, GET_TEMP_READINGS, both sets the arrays and sends the arrays to the computer after a given time period. It utilizes the built in getTempDegC() function to collect the temperature. The code is shown below.
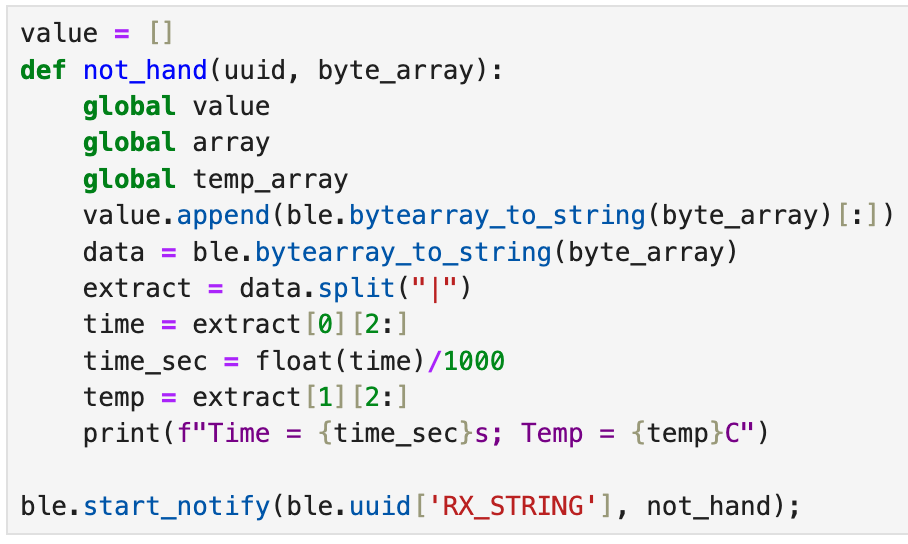
This task also utilizes a new notification handler that handles both time and temperature. The new notification handler is shown below. The command to call this case is also shown below. It also includes a few of the received messages to show the time stamp and temperature reading.
Task 7: Advantages & Disadvantages of Array Method
The advantages of using the array method is that you can collect data at a faster rate than without using the array method. This enables the Artemis to save time because it does not need to send data after each collection cycle. A potential disadvantage is that the array has a finite length, and you need to include a counter in order to correctly assess the correct length at each moment. Additionally, the Artemis's storage will fill up much faster than without using the array method. For the array method, based on the time stamps from Task 5, effective data transfer rate is 61.6 kB per second. Based on the Artemis board's 384 kB of RAM, you can store data for about 6.23 seconds before needing to send the data.
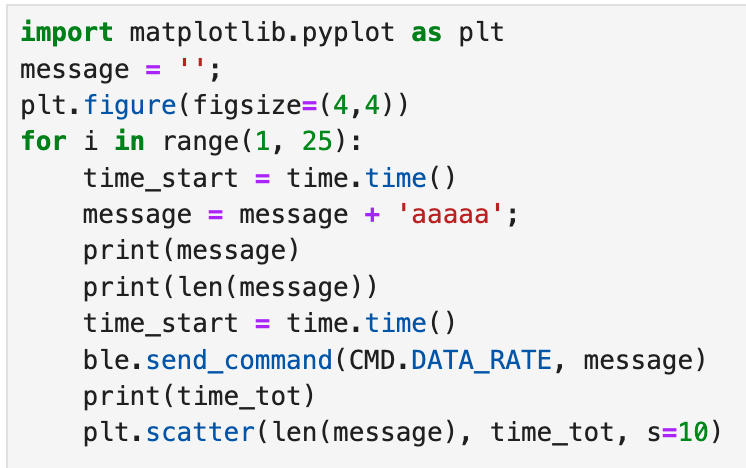
Additional Task: Effective Data Rate And Overhead
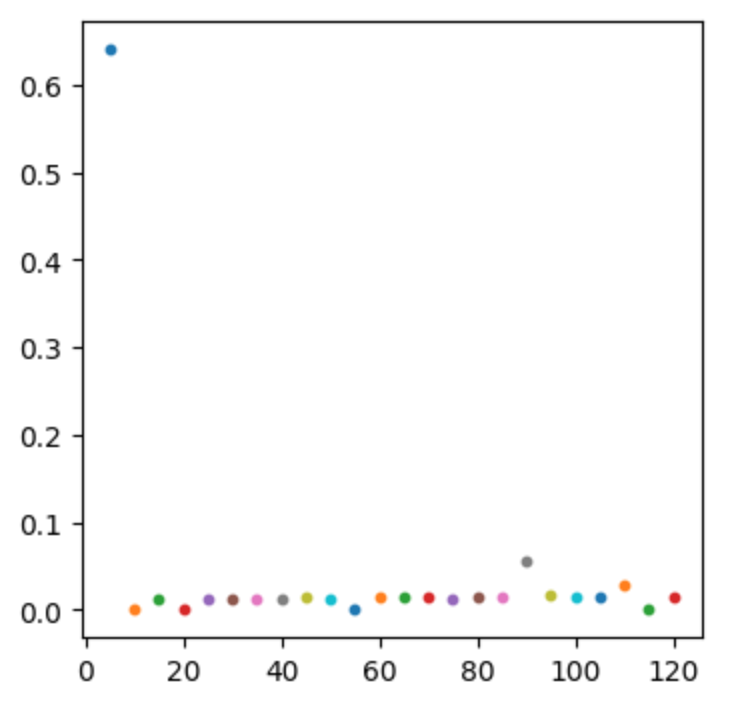
For this task, we were asked to note the respective times for sending and receiving small messages, such as 5-byte messages, and large messages, such as 120-byte messages. In intuition, the larger byte messages should take longer to send. This is because with more bytes to write, it should take longer for the Artemis to send the full communication. The graph below, however, shows that the difference is only slightly different between small and large messages. Using the expected trend mentioned earlier, I would say that larger replies help to reduce overhead, and many small messages introduce a lot more overhead. A plot is shown below of my results.
Additional Task: Reliability
In order to test reliability, I changed the amount of messages sent. In this process, I tracked the messages sent and messages received, and they perfectly matched up. This means that no data was missing, and the Artemis communicated reliably with the computer.
Lab 1B Takeaways
This lab was extremely useful as an introduction to communication via Bluetooth between the computer and Artemis board. This was also a good introduction to notification handlers and the potential uses moving forward in this course. One challenge from this lab was trying to track time on both the Artemis and computer at the same time in order to have correct time stamps. However, as a whole, this lab was worthwhile and a great building block for future labs to come.